Elektronik Genleşme Valfi Sürüş Teknikleri
Günümüzde yurtdışında elektronik genleşme valfleri iklimlendirme ve soğutmanın her alanında yaygın olarak kullanılmaktadır. Soğutma ve iklimlendirme konusunda dünyada iyi bir yerde olan ülkemizde bu teknoloji konusunda çoğu teknisyenin net bilgiye sahip olmaması sebebiyle kullanımından kaçınılmaktadır. Oysa EGV kullanımıyla hem daha verimli hem de daha sağlıklı çalışan sistemler yaratmak mümkün olmaktadır. Bu amaçla EGV hakkında bilinmesi gereken bazı konuları ve sürüş tekniklerini aşağıda sizler için ele aldık.
Elektronik Genleşme Valf Tipleri Nelerdir?
Soğutma sistemlerinde 2 tip Elektronik Genleşme Valfi (EGV) kullanılmaktadır. Yaptıkları görev aynı olsa da gerek sahip oldukları teknoloji gerekse çalışma hassasiyetleriyle birbirlerinden ayrılmaktadırlar.
- ON/OFF EGV; Solenoid valf benzeri yapıdadırlar. Sabit debide gaz akışına izin verirken yüksek frekansta açılıp kapanarak gaz debisini ayarlar.
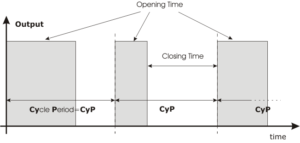
Çıkabileceği Max. Kapasiteyi belirlemek için orifis yerleştirilen Solenoid valf benzeri yapıya sahip bu tip valfler, PWM (Pulse Width Modulation) sürüş teknolojisi ile sürülmektedirler. Bu modülasyon tipi, belirlenen çevrim zamanı içerisinde valfin açık ve kapalı kalma süreleri üzerinde oynanması yöntemi ile geçirilecek soğutkan miktarının ayarlanmasını sağlamaktadır.
Avantajlar:
- Sahip oldukları basit yapı sebebiyle küçük gövdelidirler.
- Fiyatları oldukça düşüktür.
- 24VAC/DC veya 230VAC modelleri bulunmaktadır.
- Çok basit bir sürüş algoritmasına sahiptirler.
Dezavantajlar:
- Kapasiteleri düşüktür. Sadece teşhir dolaplarında ve küçük soğuk odalarda kullanılabilirler.
- Kondenser basıncında daimî dalgalanmaya sebep olmaktadırlar.
- Sebep oldukları basınç dalgalanması Superheat dalgalanmasına sebep olur.
- Hassas kapasite çıkışı vermeleri çok zordur.
- Stepper EGV; DC servo motor ile yönetilirler, değişken debide gaz akışını kontrol ederek istenilen sonuca en hassas şekilde ulaşırlar.
Çıkabileceği Max. Kapasiteyi belirlemek için orifis yerleştirilen, bu orifisin içinde servo motora bağlı hareket eden ve orifis kesitini ihtiyaç doğrultusunda daraltacak yapıya sahip valflerdir. Soğutma kapasite ihtiyacı düştükçe valf kısılmaya, ihtiyaç arttıkça da valf açılmaya başlar.
Avantajlar:
- Çok geniş kapasite aralığına sahiptirler.
- Hem iklimlendirme hem de soğutma uygulamalarının hepsinde kullanılabilmektedir.
- Çok hassas kapasite çıkışı verebilmeleri sebebiyle sistem stabilizasyonuna katkıları yüksektir.
- Tersinir çevrimde de kullanılabilirler (ısı pompası).
Dezavantajlar:
- Karmaşık yapıları sebebiyle fiyatları daha yüksektir.
- Özel sürücüye ihtiyaç duymaktadırlar.
Superheat nasıl ölçülür neden önemlidir?
Superheat (SH) evaporatör çıkışına yerleştirilen 2 adet sensör yardımıyla hesaplanan bir değerdir. Evaporatör çıkış borusuna soğutkan sıcaklığını ölçmek için sıcaklık sensörü bağlanır. Bu sensörden sonra ise aynı hat üzerine soğutkan basıncını ölçen sensör bağlanır. SH, ölçülen basıncın soğutkana göre sıcaklık karşılığı değeriyle ölçülen soğutkan sıcaklığının arasındaki farktır.
EGV yönetimi, hesaplanan SH değerinin istenen SH değerine ulaştırılması amacıyla yapılır. İstenen SH değeri, uygulamanın ya da soğutma sisteminin verimini arttırmak, gereksiz soğutkan şarjını engellemek, kompresör ömrünü arttırmak/korumak ve evaporatörden maximum düzeyde faydalanmak için sistem karakteristiklerine göre seçilir.
Stepper EGV Karakteristikleri
Her Stepper valf, kendi iç tasarımına göre tek yönlü (uniflow valf) ve çift yönlü (biflow) diye adlandırılmaktadır. Biflow gövdeli EGV ısı pompası uygulamaları için tasarlanmışlardır.
Her Stepper valf, üzerindeki DC servo motorun tipine göre de tek kutuplu (unipolar valf) ve çift kutuplu (bipolar) diye adlandırılmaktadır.
Bipolar motorlu valfler çok daha hassas kontrol imkânı tanıdığı için özelikle yüksek kapasiteli sistemlerde (Chiller vb.) tercih edilmektedir.
Her stepper valf üzerindeki motorun ve valfin yapısına bağlı olarak çalışma karakteristiklerine (parametrelerine) sahiptir. Bu parametreler, talep karşılığında valfe ulaşacak olan elektrik sinyallerinin mekanik harekete dönüştürülmesini sağlamaktadır.
Max. Adım sayısı: Valfin %100 açık olacağı adım sayısı
Min. Adım sayısı: Valfin tamamıyla kapalı olacağı adım sayısı
Kapanma fazında ilave adım sayısı: Min. Adım sayısına ek olarak uygulanacak adım sayısı
Rahatlatma adım sayısı: İlave adım sonrasında orifisin korunması için geri boşaltma adım sayısı
Hareket Akım değeri: Valfin hareket ettirilmesi için uygulanması gereken DC akım değeri
Durma akım değeri: Valfin hareketsiz kalması için uygulanması gereken DC akım değeri
Sinyal tipi: RMS veya Peak
Adım tipi: Microstep (half step) ya da normal step (full step)
Adım hızı: Valfin saniyede atabileceği max. adım sayısı
Her stepper valf sürücü, bu temel karakteristikleri kullanarak istenilen SH değerine ulaşmak için gerekli adım sayısını hesaplar ve ihtiyaç olan akım değerini de ayarlayarak gerekli kontrol sinyalini oluşturur.
Bu değerler valf üreticisi tarafından valfle birlikte verilen kullanma kılavuzuna işlenmektedir. Sisteme EGV montajı yapacak olan kişi, sistemi çalıştırmadan önce valf – sürücü bağlantısını keserek bu yapılandırma parametrelerini sürücüye girmelidir. Valf – sürücü bağlantısı bu parametreler girildikten sonra yapılmalıdır. Aksi taktirde valf zarar görebilir ve doğru çalışmayabilir.
Yukarıda belirtilen parametreler valfin gövde ve motor yapısının sürücüye tanıtılması için kullanılmaktadır. Fakat sadece bu parametrelerin girilmesi başarılı bir SH yönetiminin yapılması ya da sistem veriminin arttırılması için yeterli değildir.
Kaliteli bir EGV Sürücü iyi bir SH regülasyonu için birçok gelişmiş parametreye de ihtiyaç duymaktadır.
Ülkemizde çoğu teknisyen EGV yönetimi konusunda yeterli bilgiye sahip olmadığı için maalesef bu parametreleri girmeden, fabrika ayarlarında bırakarak vasat bir regülasyon yapmaktadır.
Önemli Bazı Kavramlar
MOP; Max. Çalışma Basıncı
Bu değer kullanılan kompresörün verebildiği azami evaporasyon sıcaklığı/basıncı değeridir. Çalışacak olan sistemin bu değerin üzerine çıkma ihtimaline karşı kompresör motorunu korumak için MOP değerini ayarlamak gerekir. Normal çalışma esnasında basıncın bu değerin üzerine çıkması durumunda sürücü SH regülasyonunu terk ederek valfi basınç regülatörü gibi çalıştırmaya başlar ve valf kısılır. Okunan değer MOP sınırının altına tekrar düşmesiyle beraber sürücü tekrar SH regülasyonuna başlar.
LOP; Min. Çalışma Basıncı
Bu değer mevcut sistemin düşebildiği asgari evaporasyon sıcaklığı/basıncı değeridir. Çalışacak olan sistemin bu değerin altına inme ihtimaline karşı sistemi korumak için LOP değerini ayarlamak gerekir. Normal çalışma esnasında basıncın bu değerin altına inmesi durumunda sürücü SH regülasyonunu terk ederek valfi basınç regülatörü gibi çalıştırmaya başlar ve valf açılır. Okunan değer LOP sınırının üstüne tekrar çıkmasıyla beraber sürücü tekrar SH regülasyonuna başlar.

HSH; Yüksek SH Eşiği
Bu değer, aşılması durumunda sistemin zarar göreceği SH eşiğini belirtmektedir. Çalışacak olan sistemin bu değerin üzerine çıkması durumunda sürücü SH regülasyonunu terk ederek valfi açarak SH’i düşürmeye çalışır. Okunan değerin HSH sınırının altına tekrar düşmesiyle beraber sürücü tekrar SH regülasyonuna başlar. Sık sık HSH eşiğinin üzerine çıkan sistemin soğutkan miktarını kontrol etmek gerekir. Soğutkan eksik olabilir.
LSH; Düşük SH Eşiği
Bu değer, aşılması durumunda kompresöre likit soğutkan girme ihtimalini arttıracak olan SH eşiğini belirtmektedir. Çalışacak olan sistemin bu değerin altına inmesi durumunda sürücü SH regülasyonunu terk ederek valfi kısarak SH’i yükseltmeye çalışır. Okunan değerin LSH sınırının üstüne tekrar çıkmasıyla beraber sürücü tekrar SH regülasyonuna başlar. Sık sık LSH eşiğinin altına inen sistemin soğutkan miktarını kontrol etmek gerekir. Soğutkan fazla olabilir.

Gelişmiş Sürüş Parametreleri
PID NEDİR: PID, Proportional Band, Integral Time ve Derivative Constant kavramlarının ilk harfleri kullanarak oluşturulan bir kısaltmadır ve gelişmiş otomasyon teknolojisinde hassas kontrol gereken her uygulamada kullanılmaktadır.
Temel olarak PID, geçen birim zaman içindeki SH değişiminin takip edilmesi ile istenen değere ulaşılabilmesi için bir valf açıklık yüzdesinin tahmin edilmesi işini yapmaktadır.
Ayrı ayrı girilebilen P, I ve D parametreleri istenen SH değerini yakalamak için farklı etkilere sahiptir.
P ETKİSİ: Proportional Band (oransal bant), SH regülasyonunun sınırlarını belirlemektedir. Bandın alt noktasında SH set değeri vardır. Bu değer hedef değer olup sürücü bu değere ulaşmaya çalışmaktadır. P değeri büyüdükçe valfin çalışma bandı büyüyeceği için valf hareketi yumuşak ve hassas olur.

I ETKİSİ: Integral Time (integral süresi), SH regülasyonu esnasında değer değişiminin anlaşılmasını sağlamak amacıyla örnekleme süresini belirlemektedir.
Bu değer büyüdükçe valf hareketi yumuşak ve hassas olur. En belirgin etkisi hata payını düzeltmektir.

D ETKİSİ: Derivative Constant (türev sabiti), SH regülasyonunda hesaplanan SH değerinin bandın dışına çıkması durumunda ani reaksiyon vererek SH değerinin bant aralığına toparlanmasını sağlamaktadır. Bu değer büyüdükçe valf hareketi agresif değişimler gösterir. Aşırı hassas regülasyon istenmedikçe bu parametre kullanılmaz.

PID ile SH regülasyonu için gereken ayarlar kalifiye teknik personel tarafından yapılmalıdır. Her uygulama farklı PID değerlerine ihtiyaç duyabilir. Teknik personel girilen ilk değerlerin ardından sistemin çalışmasını takip ederek gerekiyorsa bu değerlerde düzeltmeler yapmalıdır.
Kaliteli bir EGV sürücü, PID dışında Auto Adaptive PID ve Auto (Superheat) Tuning gibi gelişmiş algoritmalar içerir. Bu tip algoritmalar kullanıcı ya da kalifiye olmayan teknik personel tarafından yapılabilecek hataları en az düzeye indirmek için kullanılırlar.
Auto Adaptive PID etkinleştirilmiş bir sürücü regülasyonun başında varsayılan değerlerle PID regülasyonuna başlar. Geçen zaman içinde P, I ve D parametrelerinin sistem için en iyi etkiyi yaratacak değerlerini arayarak valf açıklık ayarlarını yapmaya başlar. Buradaki hedef SH’i en kısa sürede Kompresörü tehlikeye atmayacak şekilde istenen değere ulaştırmaktır. Auto Adaptive PID sistem çalıştıkça sürekli güncellenir ve ideal değerler aranır.
Auto (Superheat) Tuning etkinleştirilmiş bir sürücü regülasyonun başında varsayılan SH set değeriyle PID regülasyonuna başlar. Sistem SH set değerine ulaştığında sistem verimini arttırabilmek adına daha iyi bir superheat değerini aramaya başlar. Bu mantığa Floating Superheat de denir. Sürücüye girilen minimum SH eşiği (LSH) bu fonksiyonun durma noktasıdır. Bu sebeple LSH değerinin sürücüye doğru girilmesi gerekir.
Max Valf Açıklığı: İyi ve doğru bir SH yönetimi için kullanılacak EGV ile kompresör(ler) yakın kapasitelerde olmalıdır. Kullanılacak valf toplam soğutma kapasitesinden en az %20 daha yüksek kapasite verebiliyor olmalıdır. Valf seçimi esnasında seçilen valf soğutma kapasitesinden çok büyük seçilmek zorunda kalınırsa sistemin avlanmasını engellemek için Max. Valf Açıklığını toplam soğutma kapasitesi x 1.2 gibi bir değere indirmek gerekir.
Min Valf Açıklığı: Sürücülerde genelde min açıklık değeri sürücü yazılımına girilmiş değiştirilemez bir değer olarak kullanılmaktadır. Fakat bazı özel uygulamalarda (ör. Çift rejimli sistem veya geniş aralıkta değişken kapasite kontrollü sistemler) valf açıklığının oldukça düşük değerlere kadar inmesi istenebilmektedir. Bu sebeple iyi bir sürücüde bu değerin de değiştirilebiliyor olması çok önemlidir.
Bakım Modu ve Açıklık Değeri: Sisteme yapılacak bakım, servis, tamir vb müdahaleler esnasında SH yönetiminin devre dışı kalması istenebilmektedir. Bu sebeple çoğu sürücüde Bakım Modu ya da Manuel Mod olarak adlandırılan, valfi sabit bir açıklıkta tutan bir mekanizma bulunmaktadır. Bazen çok kullanışlı olmaktadır.
Başlangıç Fonksiyonu: Özellikle değişken kapasiteli sistemlerde sistemin ilk kalkışı esnasında verilen kapasitenin düşük olması sebebiyle valf açıklığı da düşük olur, hemen sonrasında kapasite çıkışı arttıkça valfin tepkisinin geç kalmaması için Başlangıç Fonksiyonu kullanılmaktadır. Bu fonksiyon çalış komutunun sürücüye ulaşmasıyla başlar ve belirlenen süre boyunca sabit açıklıkta valfi tutar. Süre sonunda SH regülasyonuna geçilir.
SH Nötr Bölge Yönetimi: Ulaşılmak istenen SH değerinin etrafında bir Nötr Bölge (NZ) belirlemenin bazı uygulamalarda pozitif etkisi olmaktadır. Hesaplanan güncel SH değerinin bu bölgeye girmesi durumunda valf açıklığının güncellenmesi durdurulur. Bölge dışına çıkıldığında valf açıklığı normal şekilde güncellenmeye devam eder.
Basınç ve Sıcaklık Filtreleri: Sürücülerde SH hesaplamasında kullanılan sıcaklık ve basınç verilerinin okunma frekansı değiştirilebilmelidir. Bu parametreler özellikle mekanik tesisatında problemi olan sistemlerde çözüm sağlamaktadır.
Valf Açıklığı Güncelleme Filtresi: Sürücülerde mekanik tesisatında problemi olan sistemlere çözüm sağlamakta yardımcı olan diğer bir fonksiyon da bu filtredir. Sürücü valf açıklığını verilen frekansta günceller.
Prob Hatasında Yönetim: Prob(lar) hata verdiği zaman sürücünün SH değerini hesaplaması mümkün olmayacağı için PID regülasyonu çıkış veremeyecektir. Bu durumda sistemin çalışmasını sürdürebilmesi için sabit bir açıklık oranı belirlenmesi, aranan çözüm olarak karşımıza çıkmaktadır. Aynı zamanda alarm tetiklenmesi ile durumdan teknik ekip haberdar edilmelidir.
Faydalı Harici Donanım ve Fonksiyonlar
Kondensasyon Modülasyonu Yönetimi: EGV uygulanacak sistemin hava ya da su soğutmalı kondenserinin oransal modülasyonla yönetilmesi, basınç dalgalanmalarının önüne geçilmesi ve dolayısıyla kararlı SH yönetiminin yapılabilmesi için önemli bir yardımcı fonksiyondur. Bu fonksiyonun yardımcı donanımı hava soğutmalı kondenserde Fan Hız Modülü ya da İnverterdir. Su soğutmalı sistemlerde ise 0-10V sinyal kumandalı, oransal, karışım tipi motorlu vanalardır.
Dinamik Kondensasyon Yönetimi: Kondensasyonun oransal modülasyonla yönetilmesine ilave olarak kullanılabilecek Dinamik Kondensasyon fonksiyonu enerji verimliliğini çok yukarı seviyelere çıkaracak bir etkiye sahiptir. Hava soğutmalı sistemlerde dış ortam sıcaklığına, su soğutmalı sistemlerde de su sıcaklığına göre kondensasyon set değerinin değiştirilmesi sağlanır.
Merak ettiğiniz diğer blog yazılarımıza buradan ulaşabilirsiniz.